




Israeli robotics experts recently presented an upgraded version of their earlier search-and-rescue robot that is even more agile and capable of re-configuring itself according to the challenge. In an article in Science Daily, the robot will be able to change its shape in order to scale walls and crawl through passageways that are too cramped to fit human rescuers.

The newly debuted robot is called the Rising Sprawl-Tuned Autonomous Robot (RSTAR). It is derived from the similarly named STAR, which was also designed by the Ben-Gurion University of the Negev (BGU).
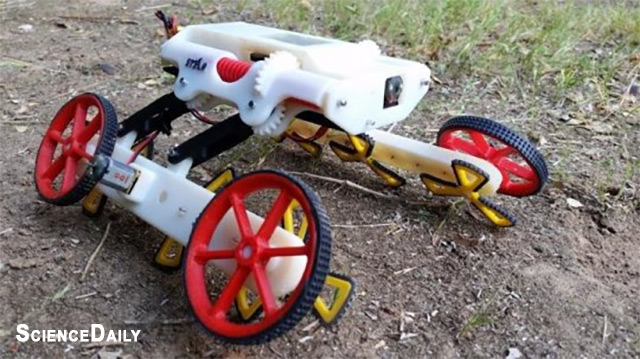
The RSTAR is equipped with legs that can draw closer to the body of the robot or extend away from it. The legs mount two different kinds of wheels and can switch between either type depending on the surface it is crossing.
These independently adjustable legs allow the RSTAR to change its size according to the area it is crawling into. It can fit through small spaces or better stabilize itself on treacherous terrain.
It will be able to clamber over big objects, climb up walls that are placed close to each other, and slip through a narrow passage with the same ease that it crosses normal flat ground. (Related: Developers roll out new robo-bee: It can fly, swim, monitor environmental studies… AND people.)
The rising star among search-and-rescue robots
A BGU team led by Dr. David Zarrouk demonstrated the RSTAR at the recent International Conference on Robotics and Automation (ICRA 2018). He called the robot the newest member of the STAR family of robots.
Zarrouk is the head of the university's Bio-Inspired and Medical Robotics Lab. He worked alongside BGU student Liran Yehezkel to refine the existing STAR design into its newest form.
He said that RSTAR is perfect for operating in collapsed structures, inundated locations, and other areas that are all but inaccessible. Zarrouk expected the robot to be able to adapt to any problem that it runs across on its way to its objective.
Compared to its predecessor, the RSTAR is simpler and more reliable. It also does not need any external help to change its shape, so it can get past obstacles on its own.
It can also travel quite fast while expending less energy than expected for the speeds it can achieve and maintain. This gives it the endurance required for numerous roles that need a robot to chug on for hour after hour non-stop.
RSTAR switches between different wheels to move across different terrain
As mentioned earlier, the RSTAR has two sets of wheels. The conventional wheels come into play for flat, sturdy ground. On these surfaces, the robot can hit a top speed of more than three feet per second.
Round wheels are unsuitable for very yielding ground. When it comes across mud or sand, the RSTAR will flip its legs over to deploy its spoke wheels, which are shaped rather like blunt fan blades. This set of wheels can get much better purchase on soft soil or grainy terrain.
The spoke wheels also allow the RSTAR to climb vertical surfaces and crawl horizontally. By pressing its spoke wheels against the walls, it can avoid coming into contact with the floor, bypassing obstacles such as deep holes filled with water.
Efforts to scale up the original STAR robot are already taking place in the BGU lab. The bigger robot will be able to climb stairs and other barriers that are too tall for its smaller kin. It will be able to haul up to four pounds of cargo, such as sensors, supplies, and a smaller STAR or RSTAR unit to get to hard-to-reach places.
Sources include:










Please contact us for more information.